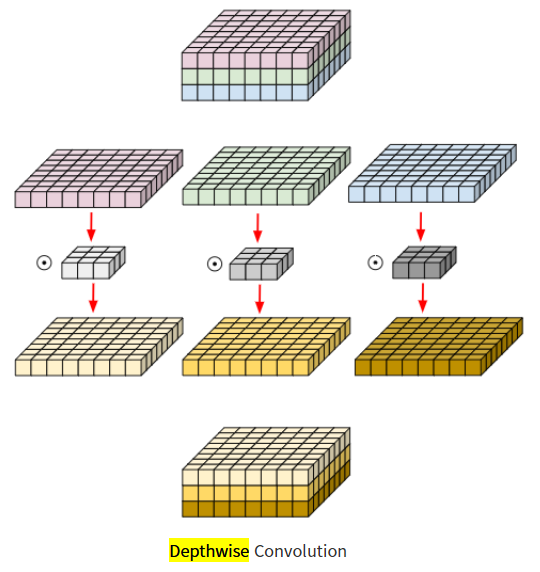
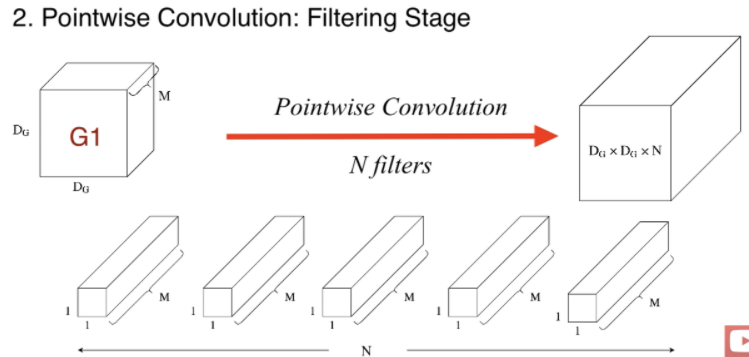
1. Depthwise Separable Convolution
def depthwise_separable_conv(input_dim, output_dim):
depthwise_convolution = nn.Conv2d(input_dim, input_dim, kernel_size=3, padding=1, groups=input_dim, bias=False)
pointwise_convolution = nn.Conv2d(input_dim, output_dim, kernel_size=1, bias=False)
model = nn.Sequential(
depthwise_convolution,
pointwise_convolution
)
return model
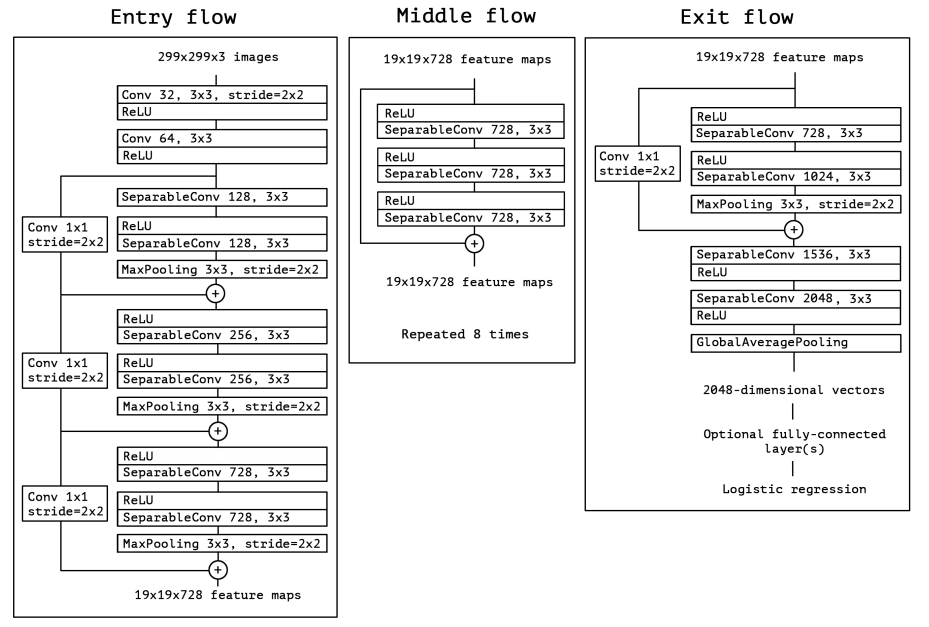
2. Entry flow
class entry_flow(nn.Module):
def __init__(self):
super(entry_flow, self).__init__()
self.conv2d_init_1 = nn.Conv2d(in_channels = 3,
out_channels = 32,
kernel_size = 3,
stride = 2,
)
self.conv2d_init_2 = nn.Conv2d(in_channels = 32,
out_channels = 64,
kernel_size = 3,
stride = 1,
)
self.layer_1 = nn.Sequential(
depthwise_separable_conv(input_dim = 64, output_dim = 128),
nn.ReLU(),
depthwise_separable_conv(input_dim = 128, output_dim = 128),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
)
self.conv2d_1 = nn.Conv2d(in_channels = 64,
out_channels = 128,
kernel_size = 1,
stride = 2
)
self.layer_2 = nn.Sequential(
depthwise_separable_conv(input_dim = 128, output_dim = 256),
nn.ReLU(),
depthwise_separable_conv(input_dim = 256, output_dim = 256),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
)
self.conv2d_2 = nn.Conv2d(in_channels = 128,
out_channels = 256,
kernel_size = 1,
stride = 2
)
self.layer_3 = nn.Sequential(
depthwise_separable_conv(input_dim = 256, output_dim = 728),
nn.ReLU(),
depthwise_separable_conv(input_dim = 728, output_dim = 728),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
)
self.conv2d_3 = nn.Conv2d(in_channels = 256,
out_channels = 728,
kernel_size = 1,
stride = 2
)
self.relu = nn.ReLU()
def forward(self, x):
x = self.conv2d_init_1(x)
x = self.relu(x)
x = self.conv2d_init_2(x)
x = self.relu(x)
output1_1 = self.layer_1(x)
output1_2 = self.conv2d_1(x)
output1_3 = output1_1 + output1_2
output2_1 = self.layer_2(output1_3)
output2_2 = self.conv2d_2(output1_3)
output2_3 = output2_1 + output2_2
output3_1 = self.layer_3(output2_3)
output3_2 = self.conv2d_3(output2_3)
output3_3 = output3_1 + output3_2
y = output3_3
return y
3. Middle flow
class middle_flow(nn.Module):
def __init__(self):
super(middle_flow, self).__init__()
self.module_list = nn.ModuleList()
layers = nn.Sequential(
nn.ReLU(),
depthwise_separable_conv(input_dim = 728, output_dim = 728),
nn.ReLU(),
depthwise_separable_conv(input_dim = 728, output_dim = 728),
nn.ReLU(),
depthwise_separable_conv(input_dim = 728, output_dim = 728)
)
for i in range(7):
self.module_list.append(layers)
def forward(self, x):
for layer in self.module_list:
x_temp = layer(x)
x = x + x_temp
return x
4. Exit flow
class exit_flow(nn.Module):
def __init__(self, growth_rate=32):
super(exit_flow, self).__init__()
self.separable_network = nn.Sequential(
nn.ReLU(),
depthwise_separable_conv(input_dim = 728, output_dim = 728),
nn.ReLU(),
depthwise_separable_conv(input_dim = 728, output_dim = 1024),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
)
self.conv2d_1 = nn.Conv2d(in_channels = 728,
out_channels = 1024,
kernel_size = 1,
stride = 2
)
self.separable_conv_1 = depthwise_separable_conv(input_dim = 1024, output_dim = 1536)
self.separable_conv_2 = depthwise_separable_conv(input_dim = 1536, output_dim = 2048)
self.relu = nn.ReLU()
self.avgpooling = nn.AdaptiveAvgPool2d((1))
self.fc_layer = nn.Linear(2048, 10)
def forward(self, x):
output1_1 = self.separable_network(x)
output1_2 = self.conv2d_1(x)
output1_3 = output1_1 + output1_2
y = self.separable_conv_1(output1_3)
y = self.relu(y)
y = self.separable_conv_2(y)
y = self.relu(y)
y = self.avgpooling(y)
y = y.view(-1, 2048)
y= self.fc_layer(y)
return y
5. Xception
class Xception(nn.Module):
def __init__(self):
super(Xception, self).__init__()
self.entry_flow = entry_flow()
self.middle_flow = middle_flow()
self.exit_flow = exit_flow()
def forward(self, x):
x = self.entry_flow(x)
x = self.middle_flow(x)
x = self.exit_flow(x)
return x